
平成17年度 Gロボット製作計画書マンマシン研究室 B4
我々4年生は卒業研究の知識としてCのプログラミングの基本的な演習をしてきた。しかし、ただの演習ではプログラミングの実用性の理解が難しい。そこで、プログラミングにより動作するロボットを作り、システム開発とプログラムの応用仕方を理解する。
今回我らは、ラインをトレースする機械を作り、トレースする様を見て楽しむ。
ライントレーサー
仕様
24V用ユニポーラステッピングモーター×2(駆動用)、フォトリフレクター×2(ライン検出用)
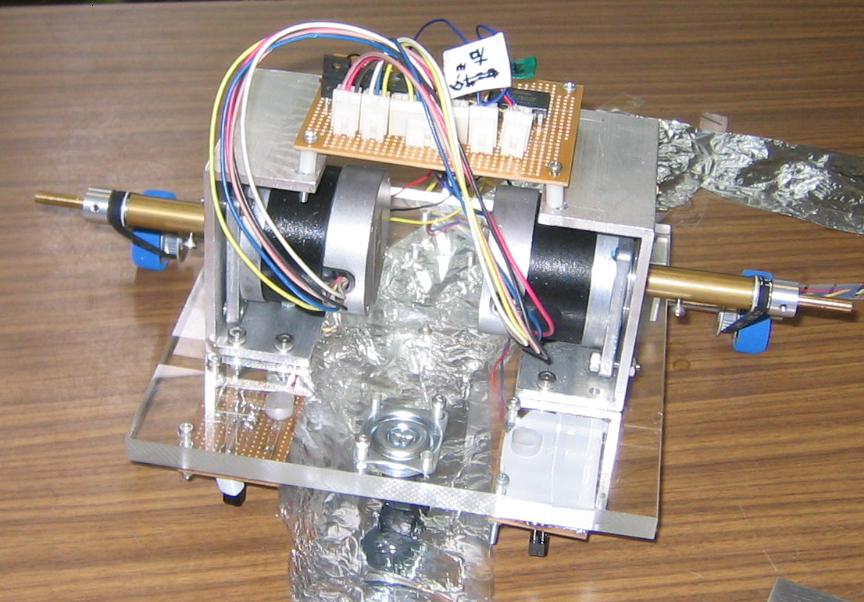
外観
むき出しの外観
仕様
(本体)
仕様(抜粋)