Program
製作者
鬼頭亮太,辻村祐介,渡邊慶,吉田昭宏
目的
卒業研究の知識としてC言語プログラムの基本的な演習を行ってきた.しかし単なる演習ではプログラムの実用性の理解が難しい.そこでプログラムにより動作するロボットを製作し,システム開発の工程とプログラムの応用の仕方を理解することを目的とする.
今年度は赤外線を発射する銃と銃の的を製作し,3段階の難易度別に的の動きを変えて,的に当てた回数を得点とする射的を製作する.
マシンの名前はShooting at the target 略して 「SATT」
日程
2012 04/23 Gロボット分担・テーマ決定
2012 05/28 Gロボット設計終了
2012 06/18 Gロボット完成(実際は7/4現在も完成はしていない)
担当
回路・プログラミング:鬼頭
回路:辻村
ハード:吉田,渡邊
仕様
ハード
ステッピングモーター×4(Step-Syn? SANYO DENKI CO.LTD)
木材(寸法)
ジュラルミン()
かつてLアングルと呼ばれいたもの×8
カム×4
赤外線を放つ銃(回路はよく分からん)etc
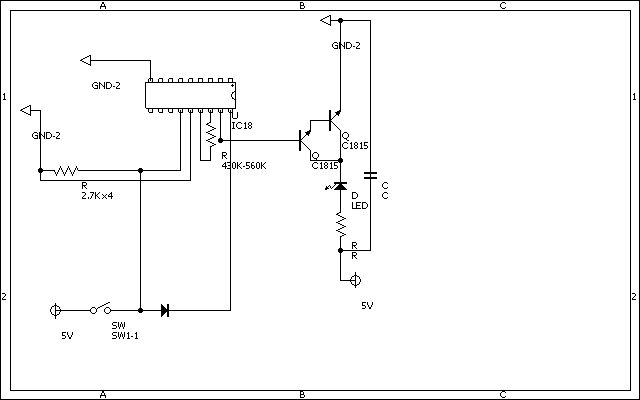
回路
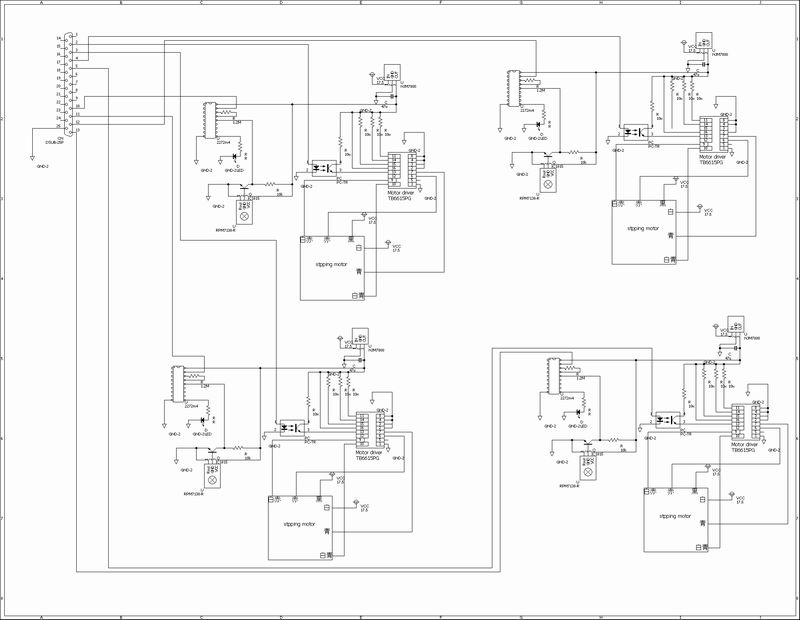
プログラミング
ゲームの難易度を選択することができ、モーターの動きを制御、そして結果を得点で表した。
プログラムの一部を抜粋
#ifndef INCLUDED_SATT_H
#define INCLUDED_SATT_H
#include <fcntl.h>
#include <dev/ppbus/ppi.h>
#include <dev/ppbus/ppbconf.h>
#include <X11/Xlib.h>
#include <X11/Xutil.h>
#include <X11/Xlocale.h> /*ロケール用ヘッダーファイル 日本語文字列表示に必要*/
#include <stdio.h>
#include <string.h>
#include <stdlib.h> /* for exit() */
#include <time.h>
#define WIN_W 800 /* ウィンドウの幅 */
#define WIN_H 600 /* ウィンドウの高さ */
#define WIN_X 100 /* ウィンドウ表示位置(X) */
#define WIN_Y 100 /* ウィンドウ表示位置(Y) */
#define B_WIN_W 200 /* ボタンの幅*/
#define B_WIN_H 100 /* ボタンの高さ*/
#define B_WIN_X 50 /* ボタンの表示位置(X)*/
#define B_WIN_Y 350 /* ボタンの表示位置(Y)*/
#define BORDER 2 /* ボーダの幅 */
#define TIME_LIMIT 60 /*制限時間*/
#define H_UP_TIME 2 /*ハードモードでの的が上がっている時間*/
#define N_UP_TIME 3 /*ノーマルモードでの的が上がっている時間*/
#define E_UP_TIME 4 /*エージーモードでの的が上がっている時間*/
#define H_I_TIME 1 /*ハードモードでの次に的が上がる時間*/
#define N_I_TIME 2 /*ノーマルモードでの次に的が上がる時間*/
#define E_I_TIME 3 /*エージーモードでの次に的が上がる時間*/
・
・
・
satt_h.h
satt_f.c
satt.c
satt.mk
[NEXT>>]
[TOP]
 http://www-mm.hm.t.kanazawa-u.ac.jp/
Monday, 28-Jul-2008 15:35:05 JST
http://www-mm.hm.t.kanazawa-u.ac.jp/
Monday, 28-Jul-2008 15:35:05 JST
www-admin@mm.hm.t.kanazawa-u.ac.jp