�ײ��
�����
����͵���á�����ͧΤ����������硤Miguel,Dulce
��Ū
´�ȸ�����μ��Ȥ���C����ץ������δ���Ū�ʱ齬��ԤäƤ�����������ñ�ʤ�齬�Ǥϥץ������μ��������������������ǥץ������ˤ��ư�����ܥåȤ�����������ƥ೫ȯ�ι����ȥץ������α��Ѥλ��������뤳�Ȥ���Ū�Ȥ��롥
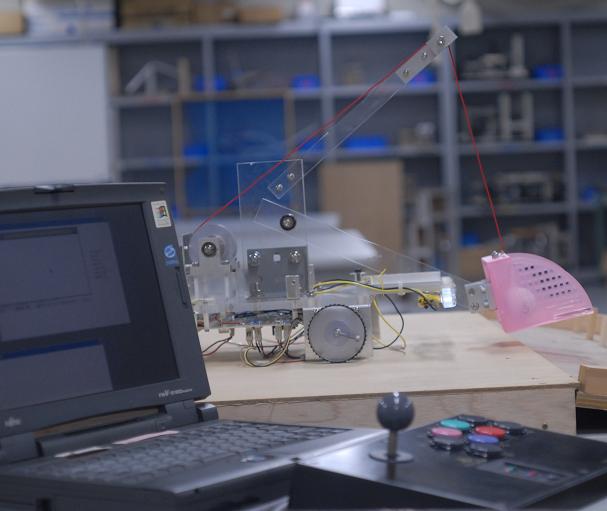
��ǯ�٤ϡ����庸�����ߤ�ư��,�ǥ���٥륫���Τ褦���о�ʪ��ư���Ƥ����äƥݥ�������ܥåȤ�����롣�ޥ���Υ����ɥ͡���ϡ�Monkey Hand�ס�
����ԥ塼������Υѥ륹����,��������ˤ�äƥ��ƥåԥ⡼�����ư�������ԡ�������λ����夲��,����Ƥ����Τ���������Ū�ξ��ޤDZ��֡�������ξ夲�����ΤȤ�LED��ή���褦�˸��롣�إåɥ饤�ȤϾ��������
����
- 6/23-5/29:�����������ᡤ���ʼ������߷�
- 5/30-6/11:�ϡ����Ȥ�Ω�ƽ�λ�ʸ��ݤ������˥��եȴ���
- 6/13-6/18:Ĵ��������
- 7/23:�����˲��
- 11/6:�Ƥ��Ƥ��ƥ��Υ�����
ʬô
- �ϡ��ɥ������ɡ�����
- ��ϩ�ɡ�����,Migeal,Dolce
- �ץ�������ɡ����
����
������
�㹽�����ʡ�
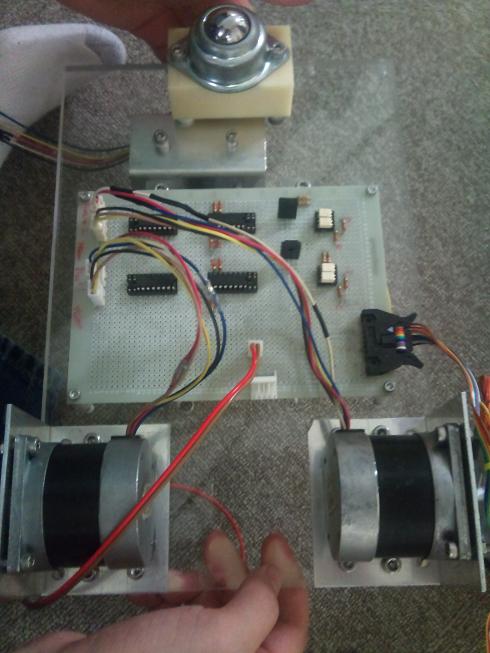
���ƥåԥ⡼�� (24V,�������ư��)��3
�������८��KHK��2
����(��,��),����,������,���,���㥹����,�Х����å�etc...
appearance

 etc...
etc...
����ϩ��
MONKEY-HAND����ϩ��
��ᥤ���ϩ��
��˥С�������ס���ߣ������ߣ�����Ĺ�����סߣ���
�⡼���ɥ饤��TB6615PG�ߣ����������ȥ�ɥ饤��TD62308BP-1�ߣ�
�ե��ȥ��ץ�TLP621�ߣ�
3ü�ҥ쥮��졼��TA7805�ߣ�
�� �������ž���180����20, 51k����20
�إåɥ饤��330����12��,10k����4
�⡼��330����6,3.3k����12,10k����6
����ǥ�22��F
�ȥ����2SC1815��24
�ǥ����ɥ�����/�ɥ饤�С�TC74HC4017AP
���ץ��������
����
�����ܡ��ɤΥ������ǥ饸����Υ���ȥ�����Τ褦�˥������Ƥ���֤Τ����Ԥλפ��̤�˥ޥ����ư����
����Ū�ˤϥ������륭���ǥޥ����Ǥ�դ�������ư��������,���Dz�ž��Enter�ǥ������ư������
������ESC��ư�����ߤ�����Ȥ������ͤǤ��롣
��ץ������(����ȴ��)��
#include"MONKEY-HAND.h"
int main(void);
int main(void){
Display *d;
Window w;
��
��
��
while(flg){
XNextEvent(d,&e);
XLookupString(&e,string,10,&key,NULL);
if(key == XK_Up){
while(e.type==KeyPress){
��
��
��
}
}
��
��
��
system("xset r on");
}
��ư�ץ������
�ᥤ���ե������ѥץ������
�إå��ե������ѥץ������
[G���ܥå�]
 http://www-mm.hm.t.kanazawa-u.ac.jp/
http://www-mm.hm.t.kanazawa-u.ac.jp/
www-admin@mm.hm.t.kanazawa-u.ac.jp