![]()
| study |
・各方面でCADデータを用いた産業用ロボットによる3K作業の自動化が進められている.
・その際ロボットハンド先端の位置・姿勢(以下ポーズ)が与えられた時にそれを満足する関節角の組いわゆるConfigurationを求める逆運動学を解かなければならない.
位置・姿勢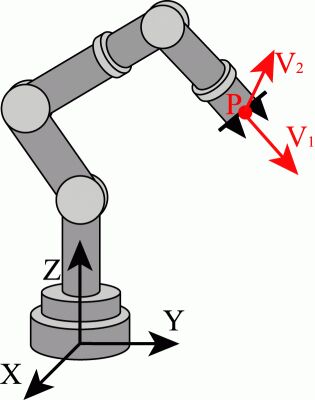 |
|
Configuration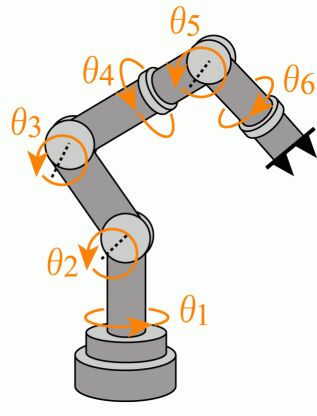 |
・しかし既存のティーチングプレイバック用に設計された先端3軸が直交しないレイアウトの多関節ロボットは解が閉じていないことが多い.
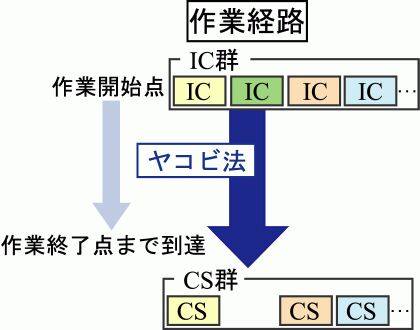
・そこで本研究では逆運動学の解法としてヤコビ法や繰り返し順変換を併用する方法を用いるが、これらの方法は数値解法であるため初期形態である初期Configurationが必要である.
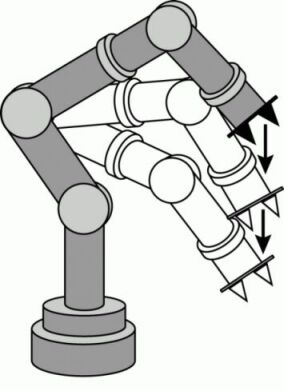
・また、CADデータより生成した作業経路(ロボットハンド先端の位置・姿勢ベクトルの集合体)からCS(Configuration
Sequence:作業経路に対するCFの集合体)を生成する際
1つの初期Configurationから生成されるCSは1つとなる.
作業経路 |
|
Configuration Sequence |
・そこで複数の初期CFを求めることで複数のCSを生成し.そしてその中から実際の作業に適した解を選択を可能にできると考えた.
| ・本研究では
CADデータから生成した工具経路を基にCSを求める際、積極的により多くの解を求め、それらを評価し戦略的に解の選択を行うオフラインティーチングシステムの開発を目的としている. |
| top | about |
| profile | study |
| favorite | beginner |
| picture | links |